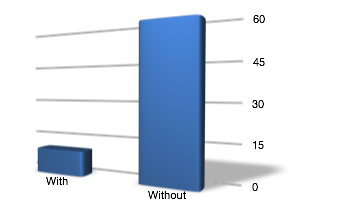
Advantages:
• Less programming
• Simple stacking modification
• Consistent stacking
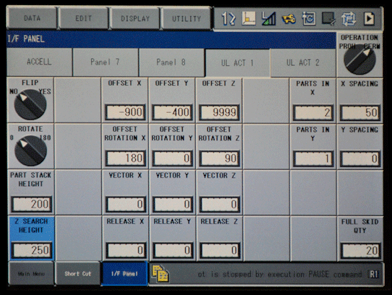
Automation Method:
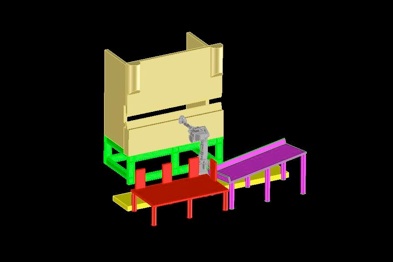
Unloading can be done by coordinate positions. X,Y and angle are typed in. Quantity in X and Y are used to fill the skid. This gives the ability to have complex unload patterns that are stacked, flipped, interlocked, and easily programmed.
Changes can be made on the fly simply by changing a value in the HMI.
Vectors are used to interlock the stack. Once a stack is interlocked, getting the gripper free can be complex. To handle this, release coordinates can be given to move the robot clear of the stack.
This dramatically reduces the size and complexity of the program.
|